广域水体监测作为生态环保、水产养殖、海洋管理等相关部门的重点工作之一,在保证一定分辨率情况下,能否对大面积纯水体目标进行完整拼接是开展广域水体监测工作的重要前提。
水体作为典型弱纹理场景,传统的二维建图方法难以实现广域水体的完整成图,尤其对于单张影像中全部为水体的场景,正常的拼接流程会引起拼接影像空洞、扭曲等问题。长光禹辰针对广域水体监测需求,基于Yusense Map软件,使用局部空三+DOM填充方式实现“湖泊水库”、“大尺度河道”、“入海口”及“海岸线”4种广域水体的整体拼接,以满足用户对大面积纯水体的监测需求。
01 湖泊、水库场景
湖泊、水库等封闭区域水体是广域水体的常见场景,尤其对于景观湖、蓄水池、水源地等对水环境要求较高的区域,定期监测有无污染情况是相关管理部门的重点工作内容之一。

M300 RTK+MS600 Pro+H20
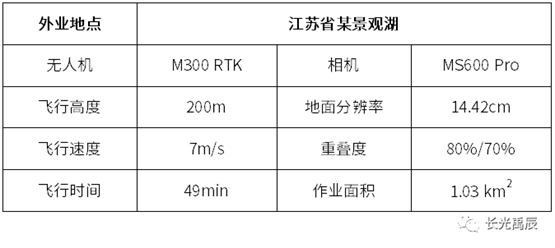
本案例选取江苏省某湖泊作为实验目标,使用M300 RTK无人机搭载长光禹辰自主研发的6通道多光谱相机MS600 Pro,获取了完整湖泊与岸线影像,具体外业情况见下表:
使用Yusense Map软件分步执行波段配准、二维建图*、反射率校正,得到最终具有反射率意义的拼接影像,其中水面部分已进行DOM填充,实现了完整的正射建图,同时使用Yusense Map Plus查看水体光谱特征曲线,符合水体光谱反射特征。

点云分布&拼接结果&光谱曲线
使用Yusense Map Plus分别进行富营养化与黑臭水分析,可以看出本案例所选湖泊整体呈现轻度富营养化情况,局部出现中度富营养化情况,与目视评估水色以及光谱曲线中红边波段反射较高的情况匹配程度较高,同时无黑臭水体污染,整体表明使用DOM填充方法对光谱属性影响较小,可以满足水体监测需求。
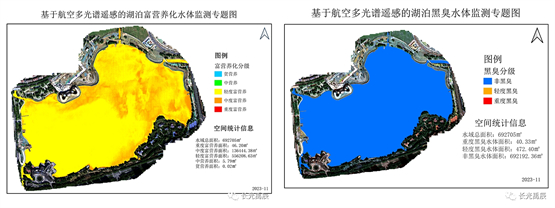
水质监测专题图
02 大尺度河道场景
货运航道、运河等河面较宽的大尺度河道因水域面积大、流速快、水面目标移动频繁等情况,在保证较高空间分辨率的前提下,河道岸线与水体难以完整成图。大尺度河道水体质量同样是河道管理部门重点关注的信息之一。

M300 RTK+MS600 Pro+H20
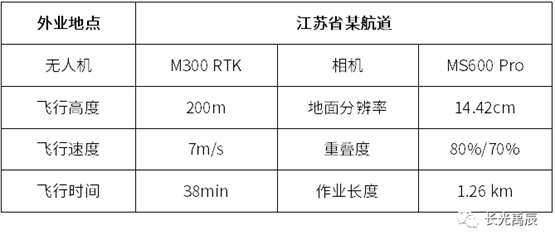
本案例选取江苏省某通航河道作为实验目标,水面宽度300m~450m,使用M300 RTK无人机搭载长光禹辰自主研发的6通道多光谱相机MS600 Pro,获取了航道与两侧岸线影像,具体外业情况见下表:
使用Yusense Map软件分步执行波段配准、二维建图*、反射率校正,得到最终具有反射率意义的拼接影像,其中水面部分已进行DOM填充,但受水面船只频繁运动的影响,拼接影像中会存在波浪,一定程度影响数据分析,使用Yusense Map Plus查看无波浪水体光谱特征曲线,符合水体光谱反射特征。
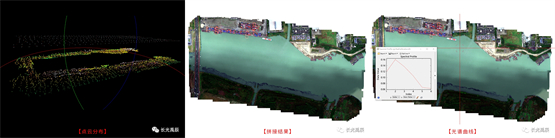
点云分布&拼接结果&光谱曲
使用Yusense Map Plus分别进行富营养化与黑臭水分析,可以看出本案例所选航道整体呈现轻度富营养化情况,主要原因是水面整体均呈现较高的反射特征,与常规水体差异明显,且实际水色偏绿,与实际情况匹配度较高,同时无黑臭水体污染,整体表明使用DOM填充方法对光谱属性影响较小,可以满足水体监测需求。
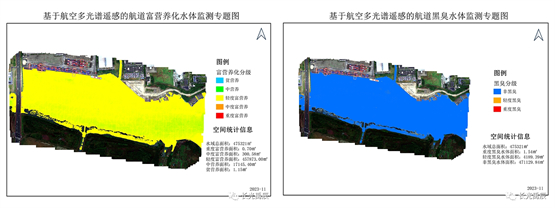
水质监测专题图
03 入海口场景
入海口是河道与海洋的交汇处,常分布着滨海湿地、河口湿地等重要自然资源,同时作为淡水与海水混合的区域,水体交换产生的污染情况也是生态环境监测的重点工作之一。水域面积大、空间分布复杂导致入海口水体质量监测难度较大。

M300 RTK+MS600 Pro+H20
本案例选取山东省某入海闸口作为实验目标,使用M300 RTK无人机搭载长光禹辰自主研发的6通道多光谱相机MS600 Pro,获取了内流河、入海口岸线与海面复合场景的影像,具体外业情况见下表:

使用Yusense Map软件分步执行波段配准、二维建图*、反射率校正,得到最终具有反射率意义的拼接影像,其中水面部分已进行DOM填充,但海面波浪明显,拼接影像中存在较多波浪与浪花,一定程度影响数据分析,使用Yusense Map Plus查看无波浪水体光谱特征曲线,符合水体光谱反射特征。
点云分布&拼接结果&光谱曲线
使用Yusense Map Plus分别进行富营养化与黑臭水分析,可以看出本案例所选入海口中的内流河部分整体呈现中度富营养化情况,海水部分呈现轻度富营养化与中营养趋势。其中轻度富营养化区域主要集中在入海闸口与景观岸线附近,闸口定期开放引起内流河水体流向海洋,同时景观岸线处底质坚固、水下高程较高,水体流速相对较慢,结合水动力分析符合富营养化空间分布规律,同时整体无黑臭水体污染,因此使用DOM填充方法对光谱属性影响较小,可以满足水体监测需求。
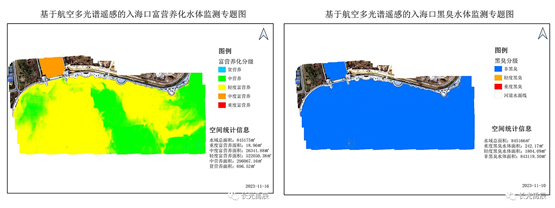
水质监测专题图
04 海岸线场景
海岸线是研究陆-海空间关系的重要场景,陆地与海洋间物质相互作用易引起水环境变化,进而影响生态系统稳定性,尤其对于红树林、海岛等重要生态保护区域,海岸线水体的水质监测尤为重要。

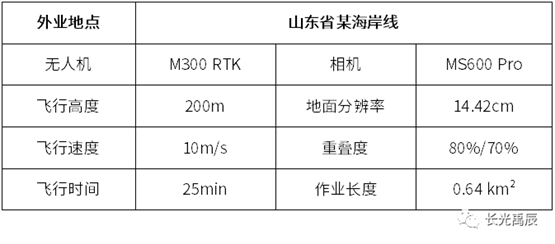
M300 RTK+MS600 Pro
本案例选取山东省某滨海岸线作为实验目标,使用M300 RTK无人机搭载长光禹辰自主研发的6通道多光谱相机MS600 Pro,获取了陆面与海面复合场景的影像,具体外业情况见下表:
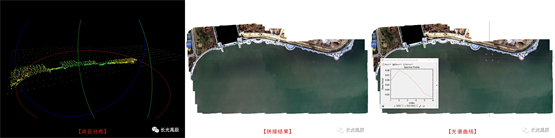
使用Yusense Map软件分步执行波段配准、二维建图*、反射率校正,得到最终具有反射率意义的拼接影像,其中水面部分已进行DOM填充。此海岸线属外海区域,海面波浪明显,拼接影像中存在大量波浪与浪花,一定程度影响数据分析,使用Yusense Map Plus查看无波浪水体光谱特征曲线,符合水体光谱反射特征。

点云分布&拼接结果&光谱曲线
使用Yusense Map Plus分别进行富营养化与黑臭水分析,可以看出本案例所选海岸线中的水体受海浪影响明显,产生大量耀斑,多波段均呈现较高反射特性,海水部分呈现中营养与贫营养趋势,其中中营养区域主要集中在岸线附近,水面中因船只波浪影响产生少量中营养区域,整体符合海洋水体常态化趋势,对于出现的少量黑臭水体区域,经分析主要是由于浪花的高反射特性引起的系统误差,不影响整体水环境的评估结果,因此使用DOM填充方法对光谱属性影响较小。
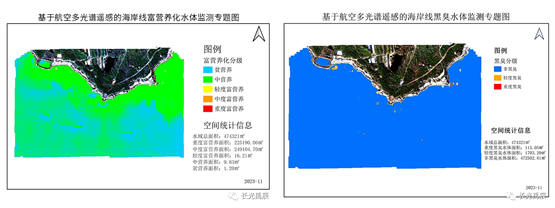
水质监测专题图
05 案例总结
本次案例验证了“湖泊水库”、“大尺度河道”、“入海口”及“海岸线”4种常见的广域水体场景,结合实例结果,基于Yusense Map实现的局部空三+DOM填充的方法可以基本满足常规场景下的广域水体处理与分析方法,但若遇波浪、水面耀斑、水面倒影引起的水体目标性状变化的情况,会一定程度影响数据处理与分析准确度。
使用Yusense Map实现广域水体拼接的功能并非流程化工具,需要进行如点云修缮、填充影像匹配、DOM编辑等辅助性操作,欢迎有相关需求的用户联系长光禹辰详细沟通。
*本文所述二维建图方法与Yusense Map常规二维建图方法存在差异,欢迎联系长光禹辰了解详情。
关于长光禹辰
长光禹辰成立于2017年,是一家由中国科学院长春光机所和青岛高新区联合成立的高新技术企业,公司核心团队来自长春光机所空间光学部,在光谱遥感、光电探测领域具有深厚的理论基础和丰富的工程经验,掌握完整的光谱仪器系统设计、先进的嵌入式视觉开发、复杂场景定量遥感智能调光、高精度自动辐射校正、光谱数据半定量反演及应用等核心技术,形成了以MS200、MS400、MS600、AQ300、AQ600等系列多光谱相机为代表的无人机载光谱遥感硬件产品线,提供Wifi Web、DJI Pilot等多种相机参数设置及控制方式,依托Yusense Map/Map Plus光谱数据预处理及分析软件、Yusense Cloud端云一体化服务平台,在农业、林业、生态、环保、警用等领域开展了深入的行业应用。公司专注于无人机航空遥感与光电探测领域,持续推出革新的软硬件产品,落地更丰富的行业应用场景,致力于用技术和产品推动行业进步。









